01
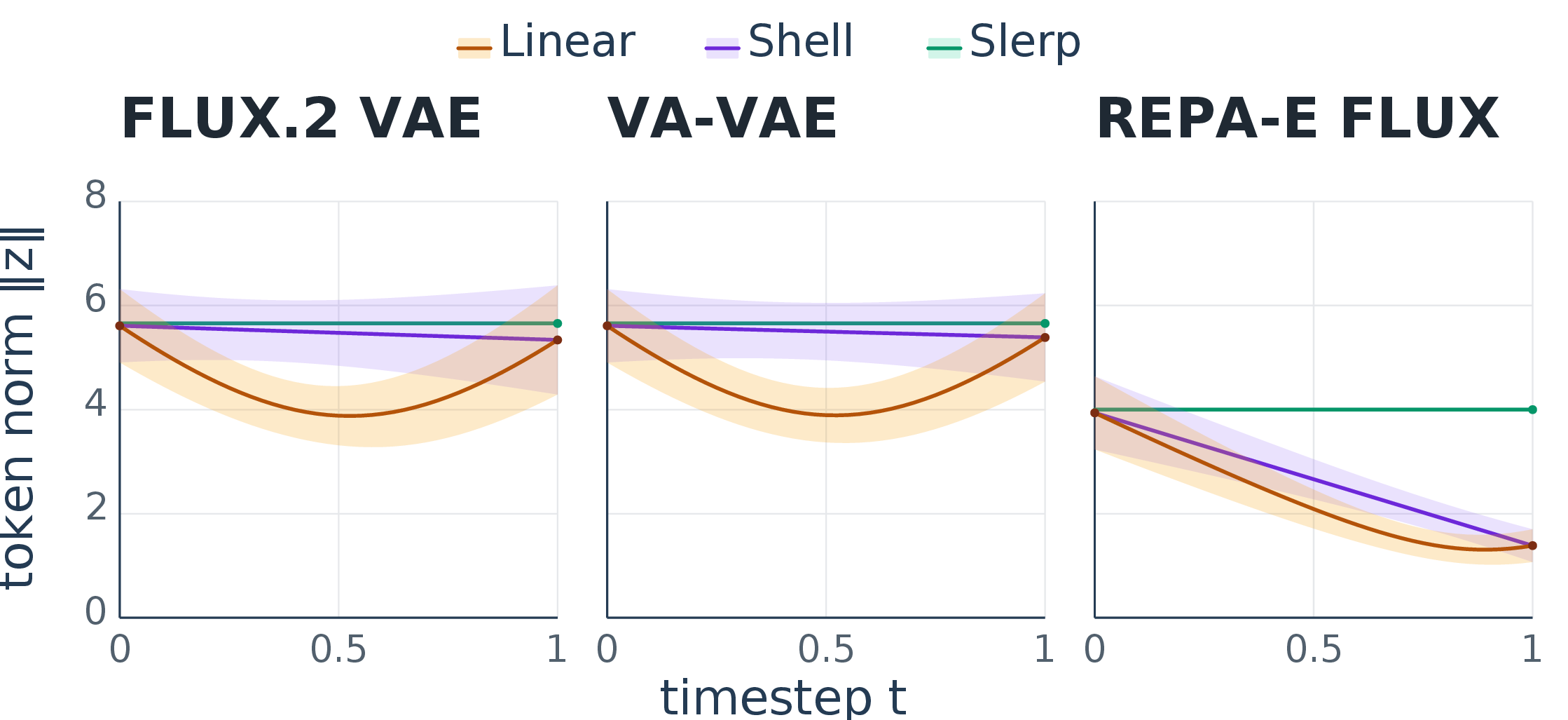
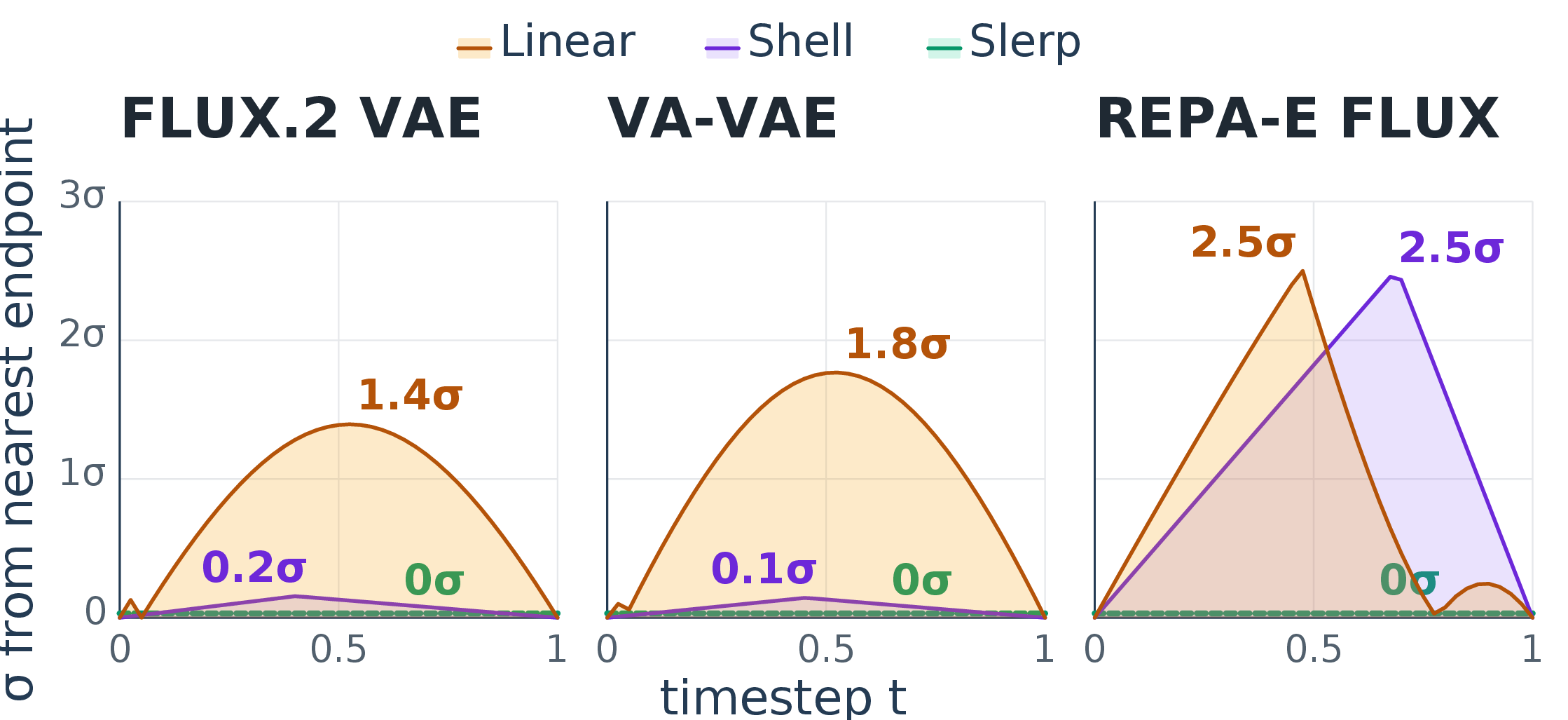
Linear paths leave the latent support.
Per-token norms concentrate tightly across all three tokenizers (\(\text{CV} \le 0.23\)). After preprocessing, FLUX.2 and VA-VAE sit close to the Gaussian shell (\(\bar r/\sqrt d = 0.94\) and \(0.95\)), while REPA-E FLUX.1 sits well below it (\(\bar r/\sqrt d = 0.35\)). Projection puts every token at \(\sqrt d\). Linear paths then deviate up to \(1.4\sigma\), \(1.8\sigma\), and \(2.5\sigma\) from the nearest endpoint shell; slerp stays on the fixed radius throughout the flow.